Advanced Tuning
The Advanced Tuning settings allows the operator to fine-tune how the machine or implement will respond to auto-steer inputs. To access the advanced tuning settings for the current tune-set profile:
Note: Some pages and options may differ based upon how the machine or implement is configured.
-
From the auto-steer Home page, select the Tools
 button.
button.
-
Select the Steering Setup
 tab.
tab.
- Select the Advanced Tuning Menu button.
Review the following sections for additional information regarding the available tune settings and options for the auto-steering application.
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
The following values and options are available for tuning the auto-steering response:
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
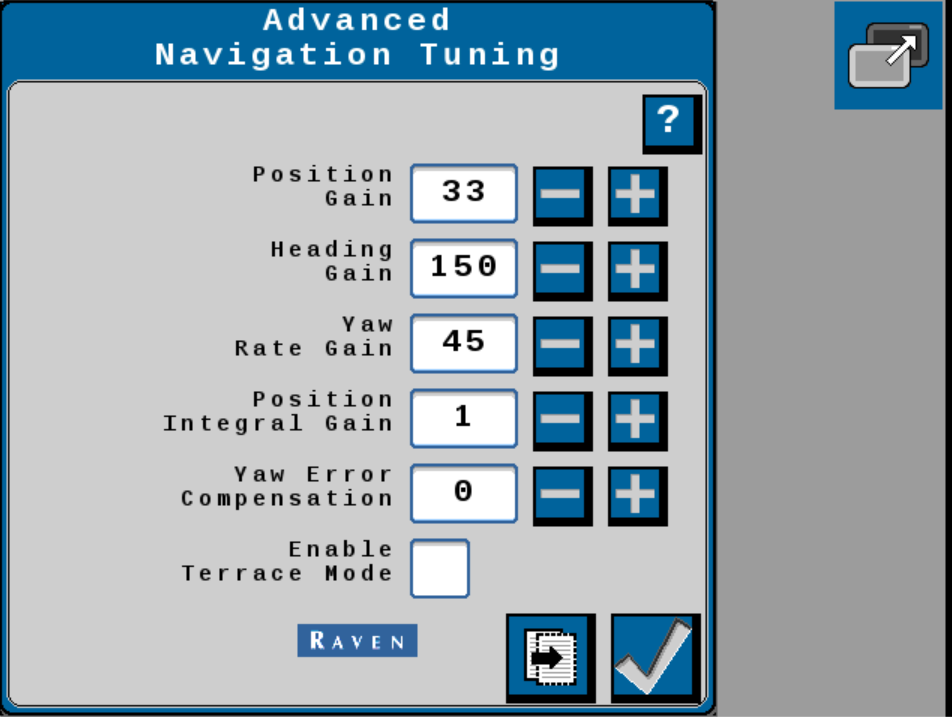
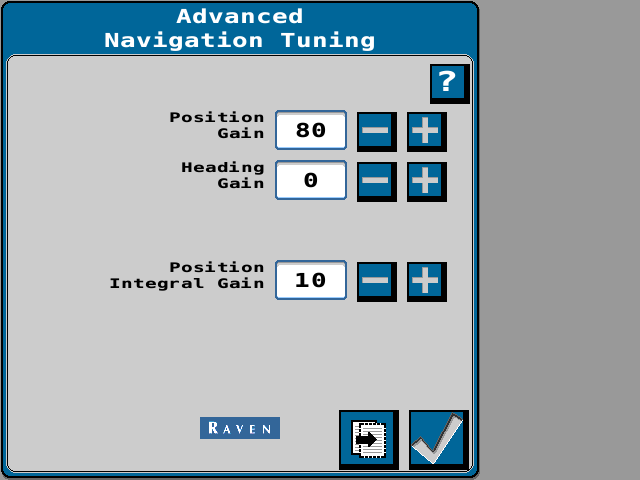
Position Gain
Determines how aggressively auto-steer responds to an off-track error. A higher Position Gain value results in a more aggressive response to an off-track error, while a lower value indicates a less aggressive response.
Heading Gain
Determines how aggressively auto-steer responds to a heading error. A higher Heading Gain value results in a more aggressive response to a heading error, while a lower value indicates a less aggressive response.
Yaw Rate Gain
Determines the impact of the yaw rate on tracking performance. A higher Yaw Rate Gain value results in a more aggressive response to yaw rate, while a lower value results in a less aggressive response.Position Integral Gain
This value corrects long-term errors in the wheel control. If the system is not achieving the desired wheel angle during operation, the system will re-direct the wheels to the desired set point. This value is generally at or near 0.
Yaw Error Compensation
Increase the yaw error compensation value to allow the machine to steer more aggressively on curves.
Enable Terrace Mode
Select the terrace mode check box to enable Terrace Mode. This mode temporarily adjusts some configuration settings to increase performance on terraced fields.
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
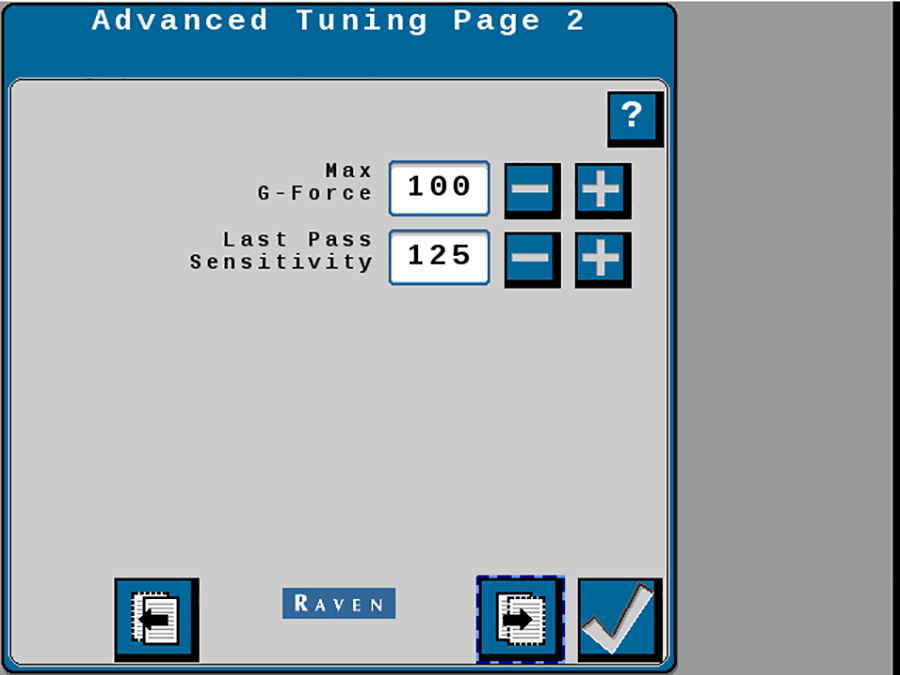
Max G-Force
Limits the centripetal force experienced by the operator during a turn. A higher value allows to the machine to perform sharper turns, while a lower value limits the machine turning radius.
Last Pass Sensitivity
Last Pass Sensitivity determines how tightly the machine tries to steer on a curved path. If the setting is too high, the machine will steer toward the inside of a curve. If the setting is too low, the machine will steer toward the outside of a curve. The Last Pass Sensitivity value ranges from 1 - 500.
Note: The Last Pass Sensitivity value only adjusts the system performance on Last Pass and A-B Curve guidance lines.
Adjusting the Last Pass Sensitivity value will not affect performance on a Pivot guidance line. To adjust pivot performance, adjust the Response Speed and Sensitivity values.
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
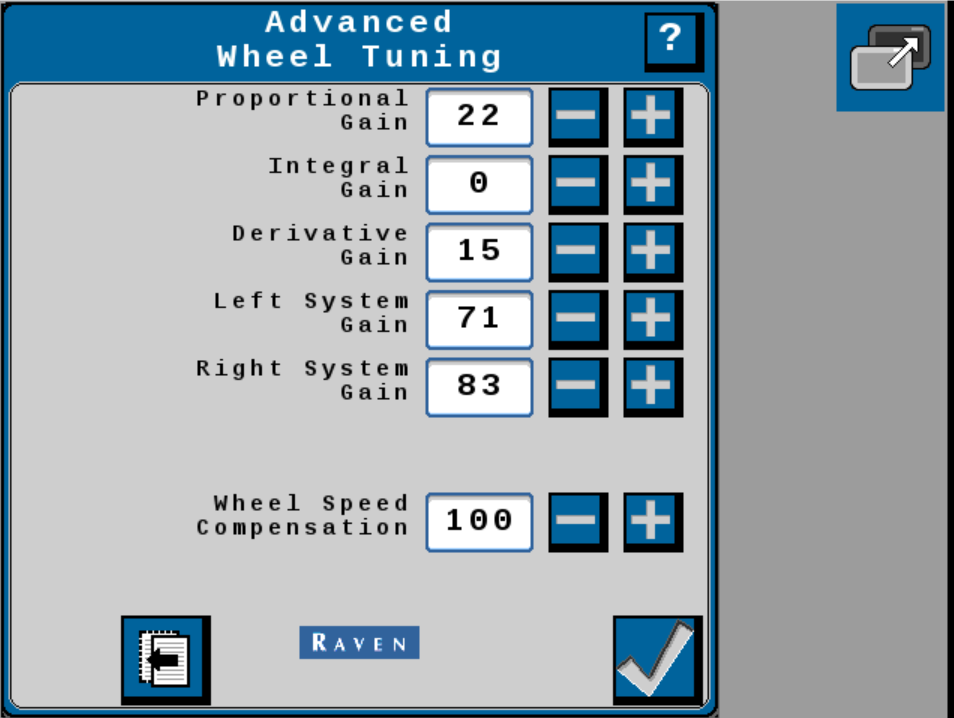
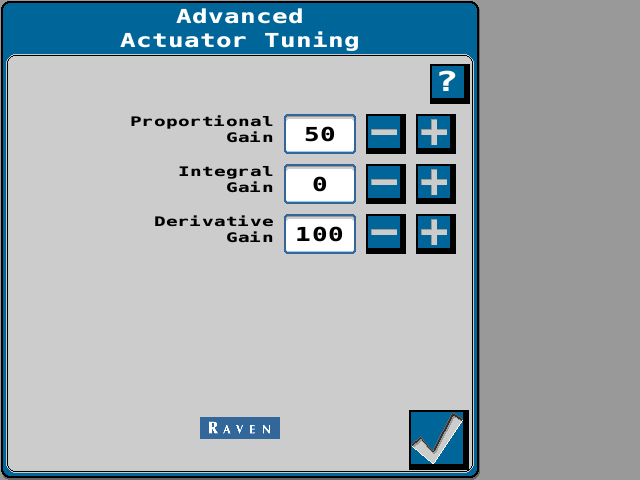
Proportional Gain
Determines the rate of the wheel response. Increasing the Proportional Gain value causes the wheel response to be faster, but can result in the machine overshooting the target wheel angle position or can cause the wheels to take a longer time to stabilize.
Integral Gain
This value corrects long-term errors in the steering control loop. This setting should be adjusted by qualified technicians only. Raven Industries does not recommend that anyone other than a qualified technician make changes to this setting.
Derivative Gain
The Derivative Gain value limits the wheel response time. A larger Derivative Gain value will reduce the tendency to overshoot the target wheel angle position, but will limit the wheel speed.
Left System Gain
Compensates for any bias or non-linearity in the steering valve while the machine is turning to the left.
Right System Gain
Compensates for any bias or non-linearity in the steering valve while the machine is turning to the right.
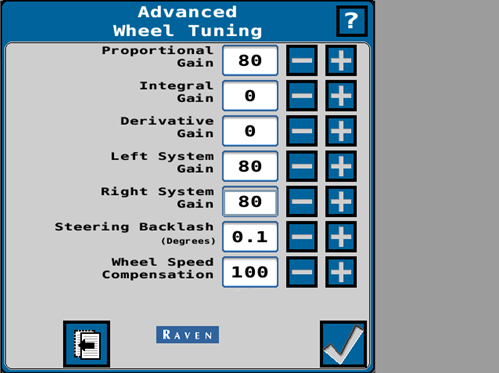
Steering Backlash (DirecSteer® Only)
The steering backlash value is used to tune auto-steering response for the free play between mechanical linkages in the vehicle steering system. In general, this value helps to account for the distance which a driver would turn the steering wheel before the steered axle begins to move.
If the backlash value is too high, DirecSteer® will constantly chatter while engaged. If the backlash value is too low, the machine will weave across the desired guidance path.
Note: The typical backlash value for newer machines with tight mechanical steering linkage should be between 0.2 and 0.4. Older machines with more operating hours may have higher values. The steering backlash value should never be above 1.0.
Use the ± buttons to increase or decrease the backlash value until DirecSteer® steers online without undesired characteristics.
Wheel Speed Compensation
This value allows the system to steer the machine more rapidly while steering on curves. A higher value will allow the system to steer more aggressively, but may cause the machine steering to be unstable. Lower the value to improve stability of the system on curved guidance lines.
-
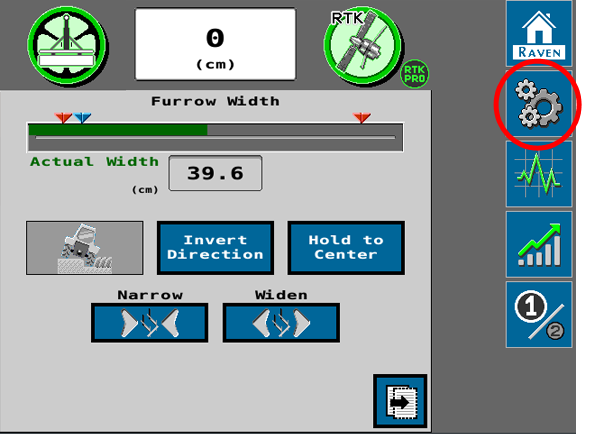
From the auto-steer Home page, select the Tools
button.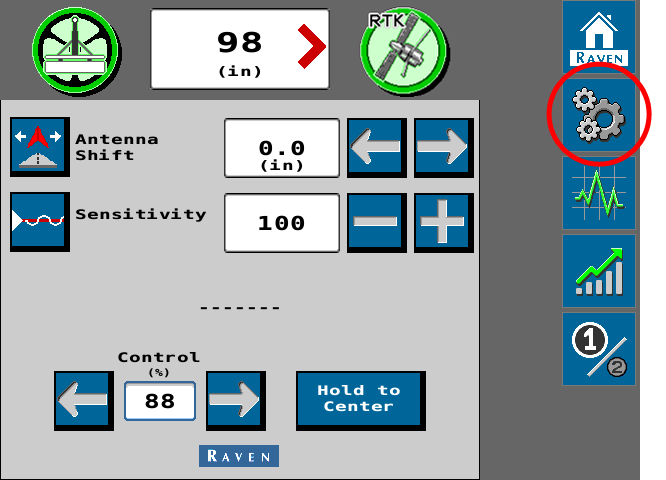
-
Select the Steering Setup
 tab.
tab.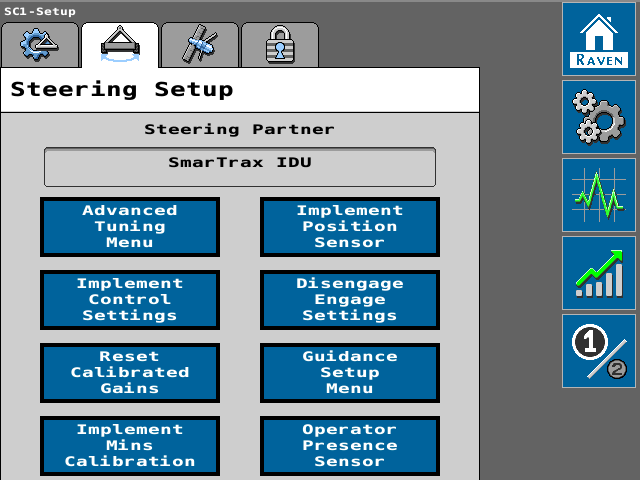
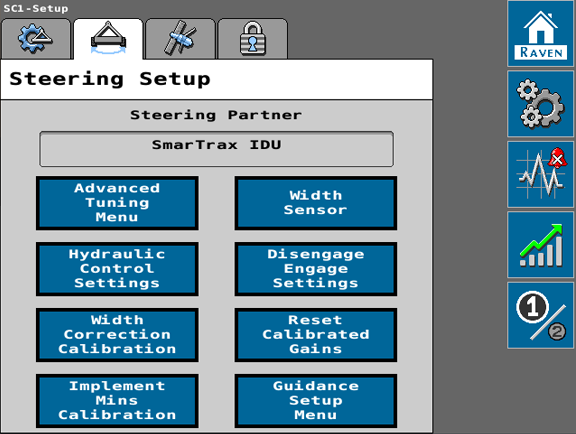
- Select the Advanced Tuning Menu button.
Review the following sections for additional information regarding the available tune settings and options for the auto-steering application.
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
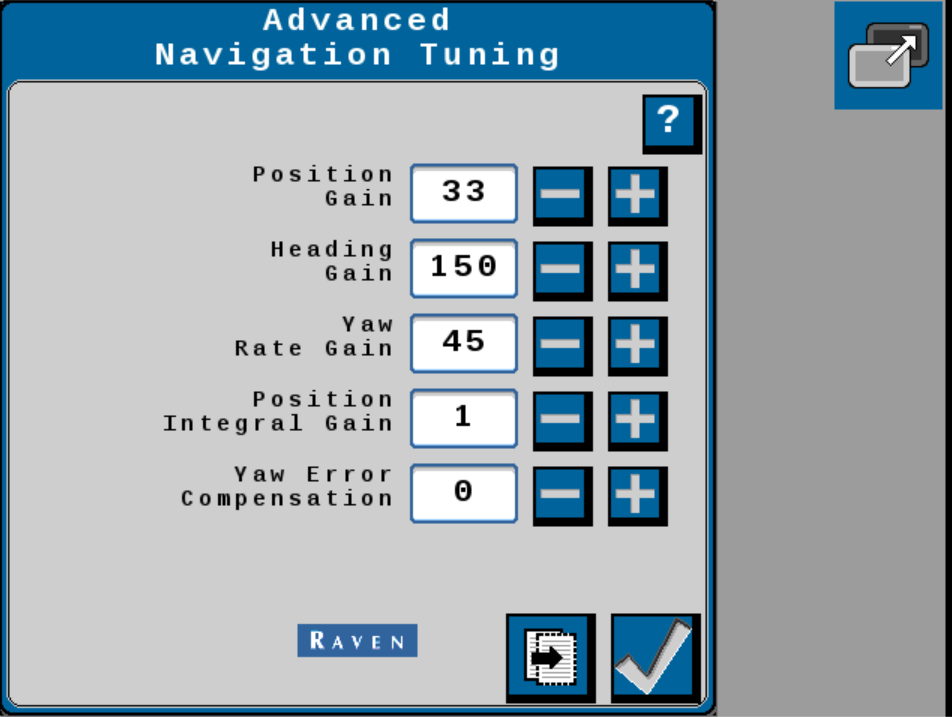
The following values and options are available for tuning the auto-steering response:
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
Position Gain
Determines how aggressively auto-steer responds to an off-track error. A higher Position Gain value results in a more aggressive response to an off-track error, while a lower value indicates a less aggressive response.
Heading Gain
Determines how aggressively auto-steer responds to a heading error. A higher Heading Gain value results in a more aggressive response to a heading error, while a lower value indicates a less aggressive response.
Position Integral Gain
This value corrects long-term errors in the actuator control. If the system is not achieving the desired actuator position during operation, the system will re-direct the position to the desired set point. This value is generally at or near 0.
Note: Use the next and previous page buttons at the bottom of the page as necessary to access additional settings.
Proportional Gain
Determines the rate of the implement steering actuator response. Increasing the Proportional Gain value causes the implement steering actuator response to be faster, but can result in the machine overshooting the target position or can cause the actuator to take a longer time to stabilize.
Integral Gain
This value corrects long-term errors in the steering control loop. This setting should be adjusted by qualified technicians only. Raven Industries does not recommend that anyone other than a qualified technician make changes to this setting.
Derivative Gain
The Derivative Gain value limits the implement steering actuator response time. A larger Derivative Gain value will reduce the tendency to overshoot the target position, but will limit the implement speed.
Last Revised: Dec 2024