Note: Some pages and options may differ based upon how the machine or implement is configured.
-
From the auto-steer Home page, select the Tools
 button.
button.
-
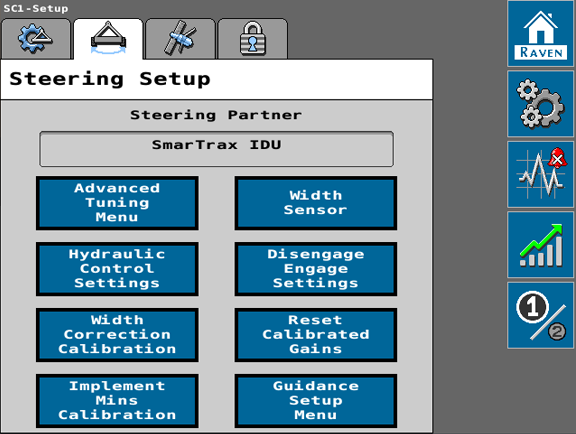
Select the Steering Setup
 tab.
tab.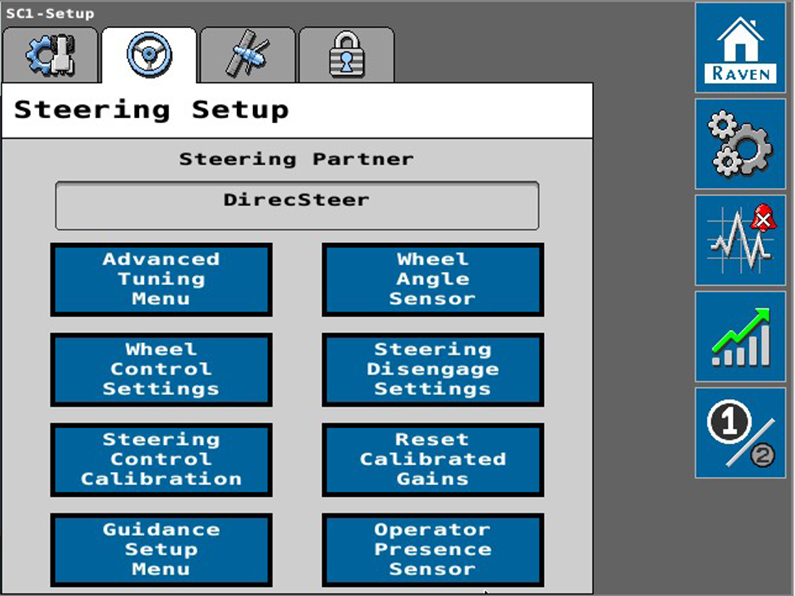
-
Select the Wheel Angle Sensor or Implement Position Sensor button.
Informational Readouts
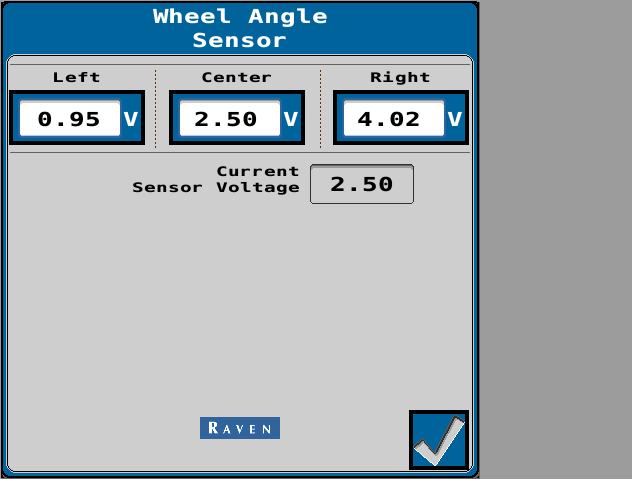
The Wheel Angle Sensor or Implement Position Sensor page displays the following information:
Wheel Angle Sensor Applications
Left, Center, and Right Values
Displays the current sensor voltage set point value for each sensor position.
Current Sensor Voltage
Displays the current voltage of the wheel angle or implement position sensor.
When the operator turns the steering wheel, this value will increase or decrease, depending upon which way the wheel is turned, through the sensor range.
Current Wheel Angle
Displays the current angle of the steer axle.
While driving straight forward, this value should be zero. If the machine is steered to the left, this value will display negative and when steered to the right, this value will display positive.
-
From the auto-steer Home page, select the Tools
button.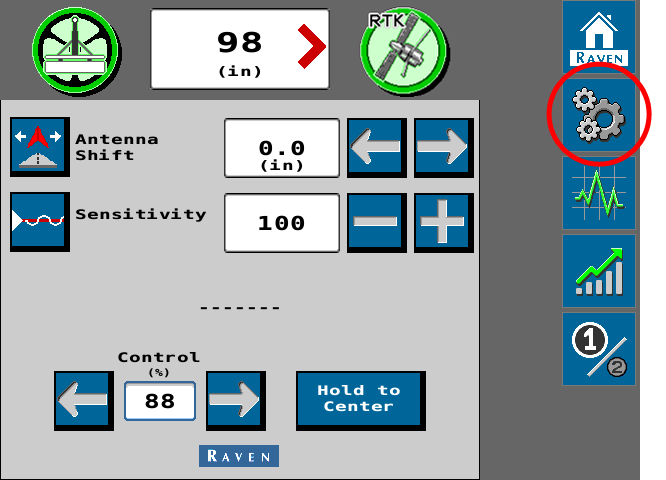
-
Select the Steering Setup
 tab.
tab.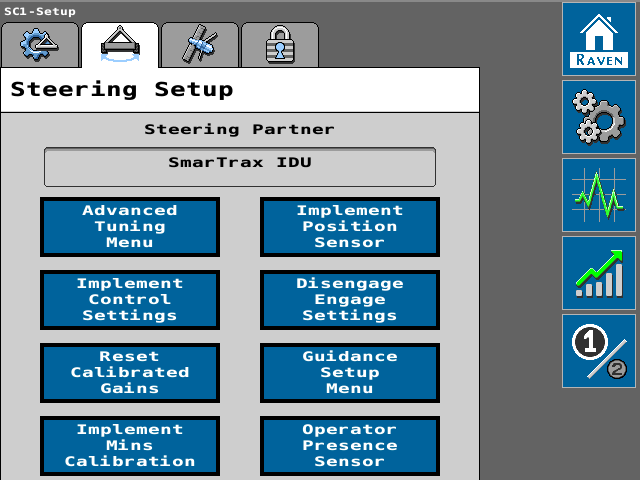
-
Select the Wheel Angle Sensor or Implement Position Sensor button.
Informational Readouts
The Wheel Angle Sensor or Implement Position Sensor page displays the following information:
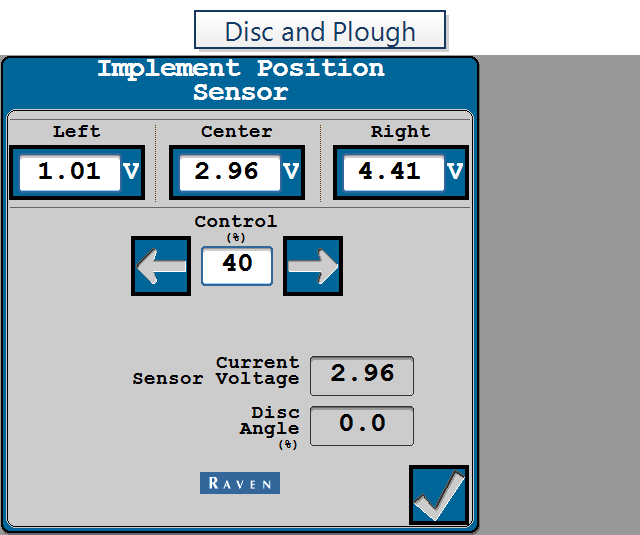
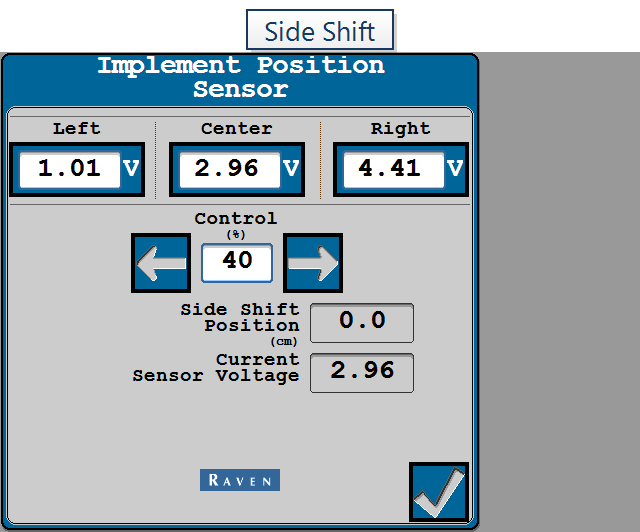
 Implement Position Sensor Applications
Implement Position Sensor Applications
Left, Center, and Right Values
Displays the current sensor voltage set point value for each sensor position.
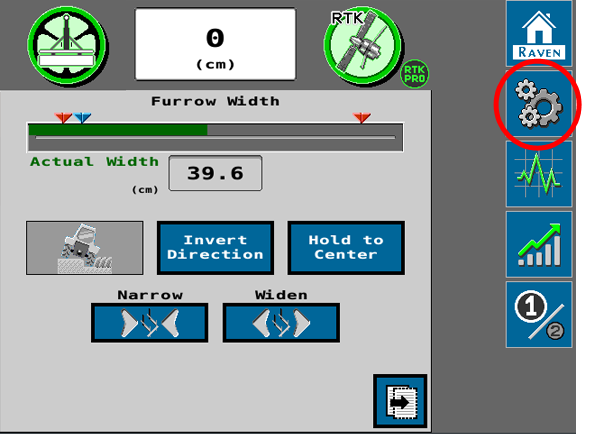
Side Shift Position
Current offset distance from the center of the implement.
Current Sensor Voltage
Displays the current voltage of the wheel angle or implement position sensor.
When the operator turns the steering wheel, this value will increase or decrease, depending upon which way the wheel is turned, through the sensor range.
Disc Angle
Current disc angle percentage with respect to the calibrated center position.
Calibrate the Sensor Positions
To Calibrate the Left Position
- Drive the machine forward at 2 - 6 km/h [1 - 4 mph].
- Select the Left position button.
- Manually turn the steering wheel to the full left lock.
- Select the Left position button again to save the new Left position value.
To Calibrate the Center Position
- Drive the machine forward at 2 - 6 km/h [1 - 4 mph].
- Select the Center position button.
- Manually center the steering wheel to drive straight ahead.
- Select the Center position button again to save the new Center position value.
To Calibrate the Right Position
- Drive the machine forward at 2 - 6 km/h [1 - 4 mph].
- Select the Right position button.
- Manually turn the steering wheel to the full right lock.
- Select the Right position button again to save the new Right position value.
Last Revised: Oct 2024
“ProTrakker™ is a registered trademark of MBW Products”