Validate the OMNiDRIVE™ System Install
- Metric socket set - 5 to 24 mm
- Metric Allen wrenches - up to 8 mm
Bleed the Brakes
The brake system must be serviced before the tractor may be returned to service or moved to complete the provisioning processes. Refer to the tractor service manual for the brake bleeding procedure. Contact your local equipment dealer for additional assistance with servicing the brake system.
Validate the OMNiDRIVE™ System Connections
- Toggle the battery disconnect back to the on position.
- Turn the tractor on and check for hydraulic leaks.
- Check that the clutch and brakes function normally when operating the tractor in non-autonomous mode.
- Check that the OMNiDRIVE™ system is booting (e.g. the perception controller, RS Lite, and MCM object pools
 The user interface for a system or feature connected to an ISOBUS UT. load in the ISO/working set The user interface for a system or feature connected to an ISOBUS UT. menu).
The user interface for a system or feature connected to an ISOBUS UT. load in the ISO/working set The user interface for a system or feature connected to an ISOBUS UT. menu). - Check that all 5 perception cameras and radar sensor are online in the Perception Controller working set.
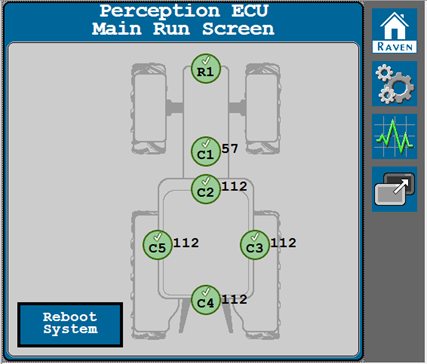
Verify that all cameras and radar sensor are connected.
Green - Device Connected
Red - Device not Connected / Not sending status messages
Status Icons R1 Radar Sensor C1 Forward Facing Camera (Model 57) C2 Front Hazard Camera C3 Right Hazard Camera C4 Rear Hazard Camera C5 Left Hazard Camera Click on any status icon to pull up the detailed sensor status page.
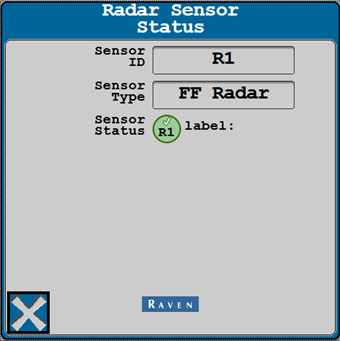
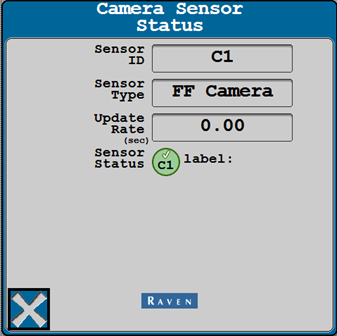
Sensor Status
Sensor ID - Corresponds to the label on the main run screen.
Sensor Type
FF Radar
FF Camera - 57
Hazard Camera - 1125
Update Rate - Rate that Frequency status messages are being received.
Sensor Status - Matches the icon on the main run screen.
Label - Details of any object detected in the camera frame.
Messages relating to the status of the sensor itself are displayed in the empty space at the bottom of the screen.
If a perception camera does not connect the cameras can be swapped for troubleshooting purposes. The system will need to be rebooted every time a camera is swapped or unplugged.
Proceed to the Perception Controller Troubleshooting for more information.
- Toggle the OMNiDRIVE™ bypass switch to the autonomous position and check that the perception lights are on.
- Move the machine outside and confirm RTK Real-time Kinematic corrections are received.
Last Revised:Jul 2024