Guidance and GNSS Calibration
Note: The following steps are intended to outline the calibration procedure. Some options shown will be dependent upon settings and options selected.
- Open the UT
 A Universal Terminal (formerly Virtual Terminal) is an electronic display or console capable of interfacing with ECUs on an ISOBUS network. menu of the display or field computer.
A Universal Terminal (formerly Virtual Terminal) is an electronic display or console capable of interfacing with ECUs on an ISOBUS network. menu of the display or field computer. - During the initial start-up of system, the operator will be presented with the Operator Liability prompt.
Note: Refer to the Operator Liability topic for more information.
- Select the guidance and steering terminal
 from the UT menu. The Machine Selection page is displayed.
from the UT menu. The Machine Selection page is displayed.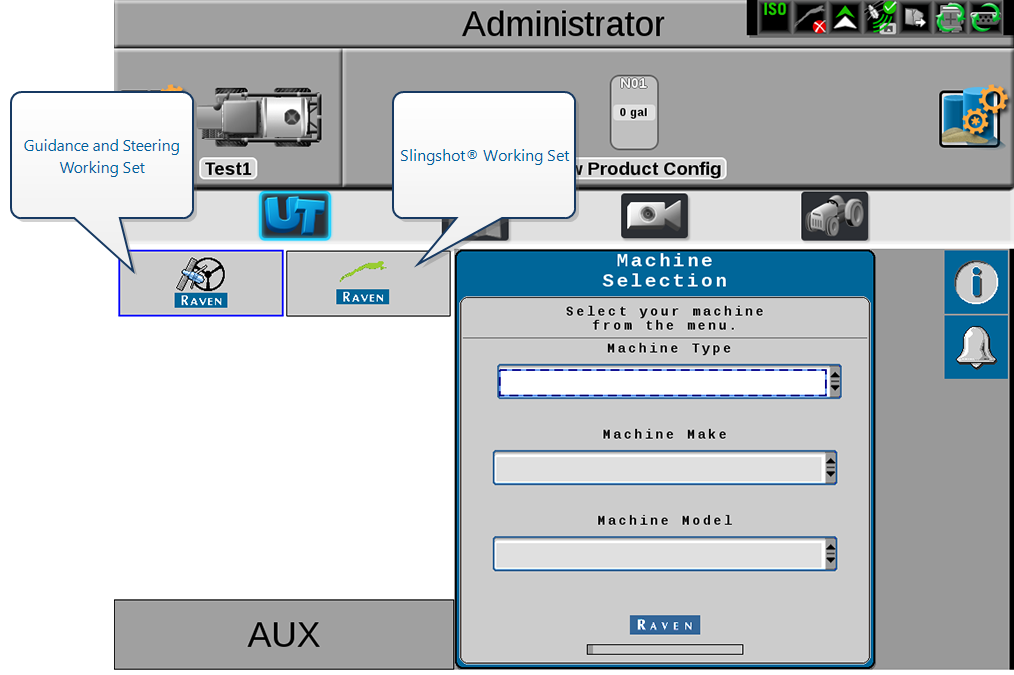
Note: The Slingshot® terminal icon only displays when calibrating the Raven RS1™.
- Confirm that the correct ECU Electronic Control Unit will be programmed by selecting the Information icon in the upper, right corner and matching the Hardware Serial Number to the ECU serial number mounted to the machine or implement.
Note: If the Machine Home page displays, the ECU is calibrated already for that terminal. Check other terminals for an ECU that has not been calibrated.
- The Machine Selection page will be displayed.
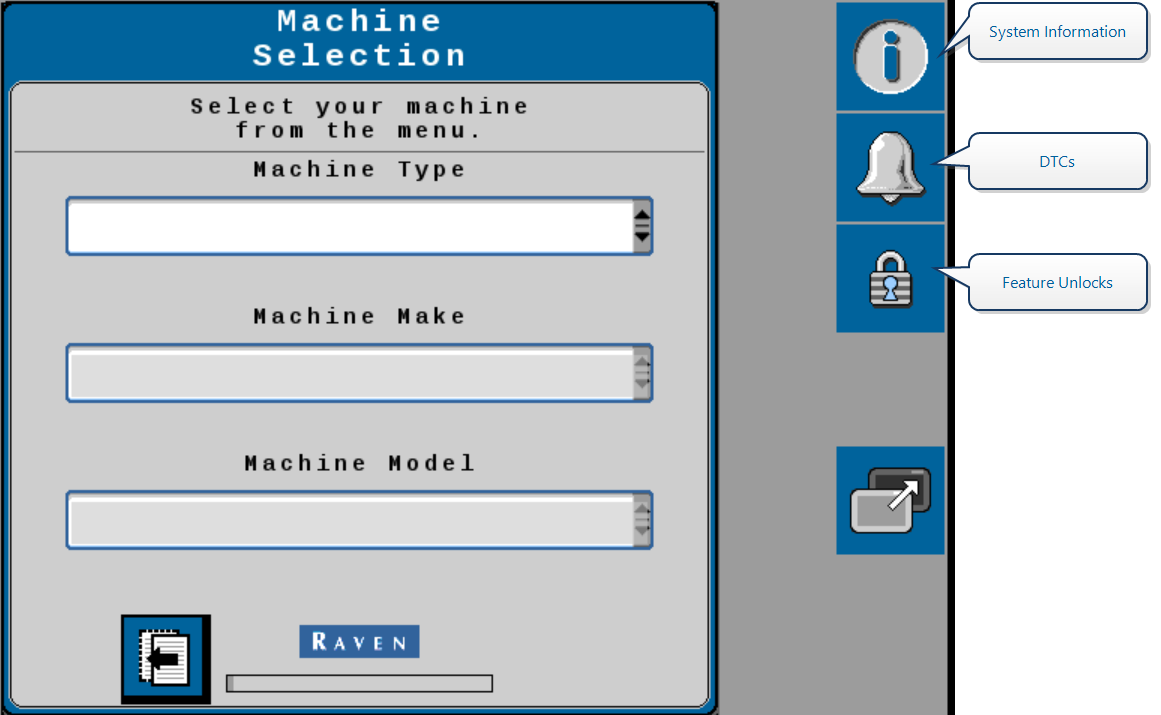
Note: System information, DTCs, and system test pages may be viewed during the initial calibration. For further information on these settings, review the following topics:
Note: The system health test pages provide additional diagnostic capabilities and allow the operator to test function of various machine controls and sensors.
- Use the drop-down options to set the Machine Type.
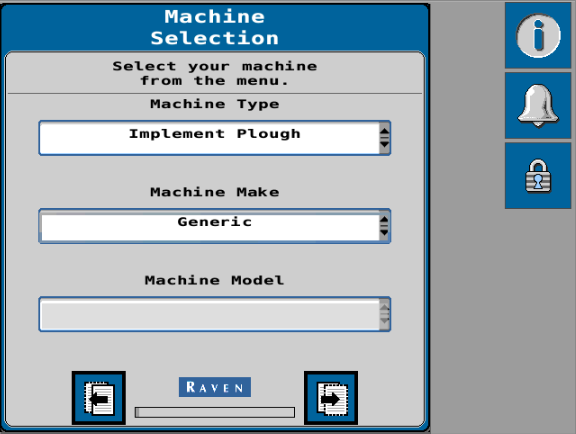
- Implement Plough - select this option when steering a mounted plough implement.
Note: If using preconfigured (e.g. non-generic) tunesets, some machine/implement offset values will be pre-populated on the following pages of the initial calibration wizard. It is recommended to confirm these values on your specific machine and implement for best tuning and performance.
- Select the Next button.
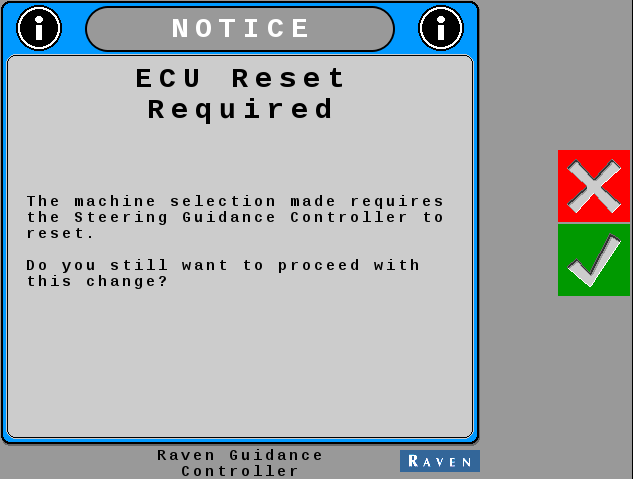
Note: The SC1™/TC1™ ECU is configured to steer tractors and sprayers from the factory. The ECU will need to be reset for implement steering operations and restarted before the initial calibration wizard can be completed. Complete the following steps to reset the ECU.
- On the ECU Reset prompt, select the Accept button.
- Wait for the ECU to restart and the terminal to repopulate in the UT menu.
- When the ECU restarts, select the Implement Guidance and Steering terminal from the UT menu.
- Select the Next button.
-
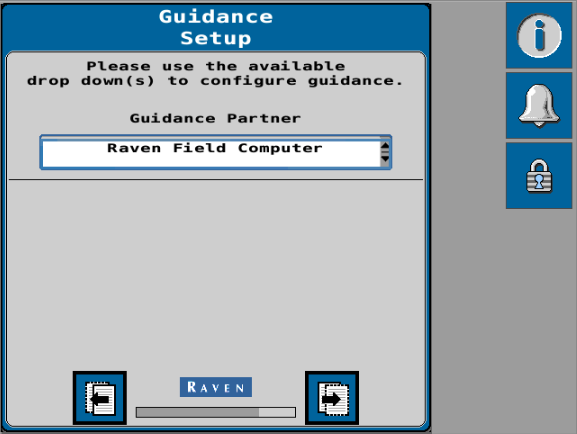
Note: For additional information on the Guidance Setup Menu, refer to Guidance Setup Menu.
- Once the Machine options are set, select the Next page button to proceed with the initial calibration.
- The system will attempt to detect a steering partner.
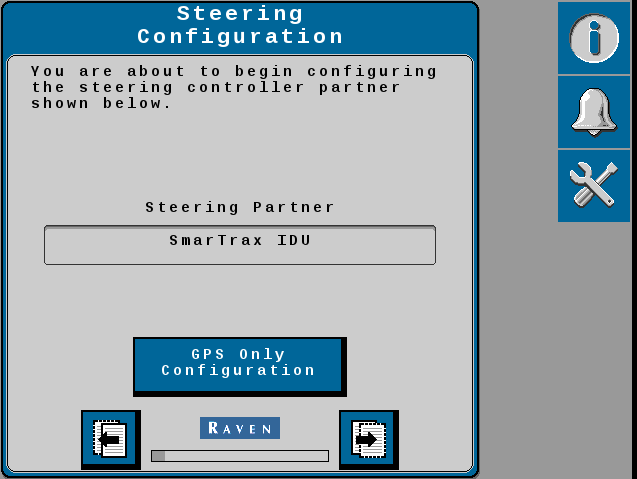
- If no steering partner is detected, or if steering will not be used in the current application, select the GPS Only Configuration button. In this configuration, auto-steer features will not be available.
Note: The GPS Only Configuration should not be used with implement guidance and steering systems.
- If a steering partner is detected, select the Next button to calibrate both the GNSS Global Navigation Satellite System and auto-steering features of the system.
- If no steering partner is detected, or if steering will not be used in the current application, select the GPS Only Configuration button. In this configuration, auto-steer features will not be available.
- Use the drop-down to select the appropriate GNSS receiver.
Note: When configuring a system with the RS1™, the receiver selection page may not display.
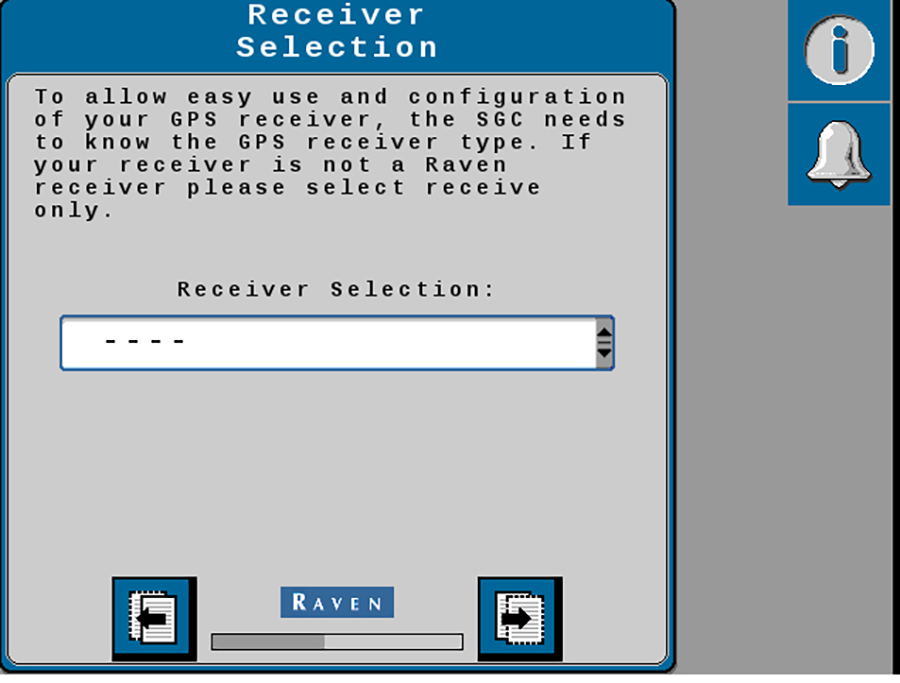
Note: Receiver setup will need to be done prior to performing the steering calibration. Only the Raven700S™, Vector Pro, and Cygnus GNSS receivers will be automatically configured via the SC1™. All other receivers will need to have the serial port manually configured to output the following messages at the following rates:
Note: 372/392 GNSS receivers must be configured via AgRemote.
- Select the Next page button.
- Enter the Antenna Fore/Aft measurement in the units displayed on the page.
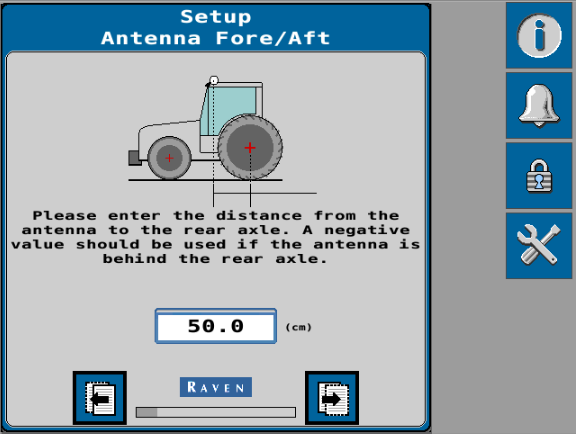
Note: The Antenna Fore/Aft position is the measurement between the rear axle of the machine to the middle of the GNSS antenna unit. Enter a negative value if GNSS antenna unit is mounted behind the rear axle.
- Select the Next page button.
- Enter the Antenna Center offset measurement in the units displayed on the page.
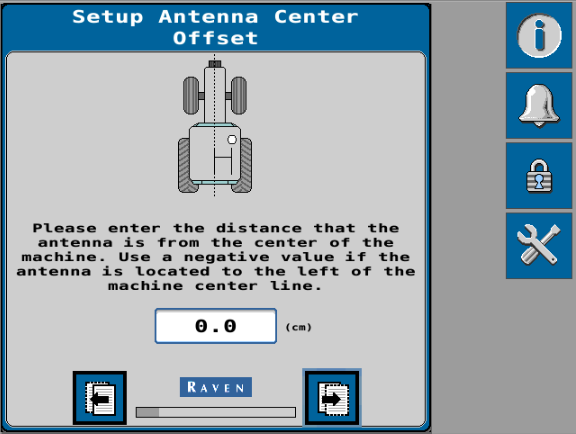
Note: The Antenna Center Offset position is measured from the center line of the machine to the center of the GNSS antenna. A negative value should be entered if the GNSS antenna is located to the left of the center line.
- Select the Next page button.
- Enter the Antenna Height measurement in the units displayed on the page.
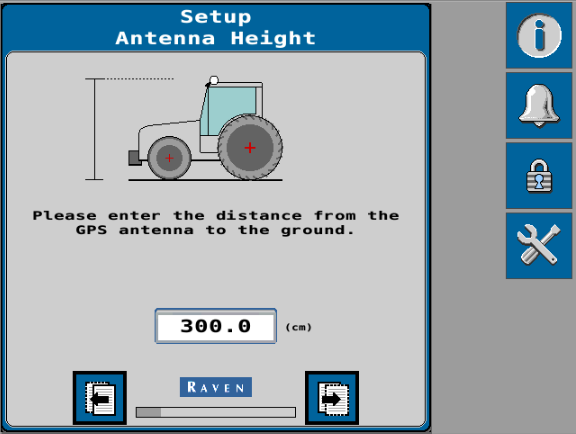
Note: The Antenna Height is measured from the ground to the center of the GNSS antenna.
Note: The Antenna Height is measured from the ground to the center of the GNSS antenna with the implement lowered to working position.
- Select the Next page button to proceed.
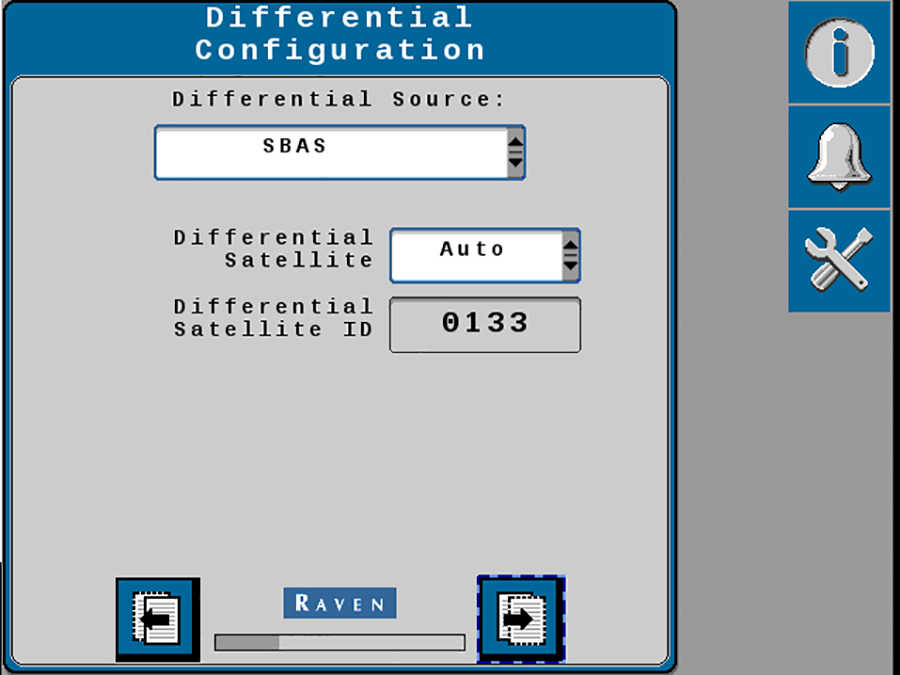
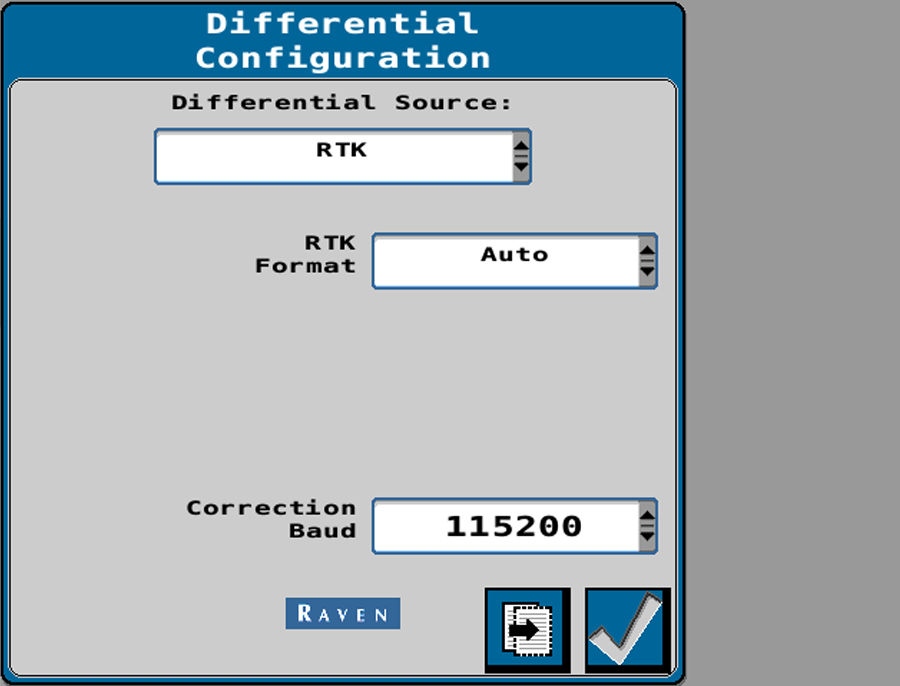
- Select the appropriate GNSS Differential Differential Global Positioning System is an enhancement to standard GNSS/GPS messages to provide better position accuracy. Source from the drop-down options list.
- GLIDE®
- SBAS
- GS-Lite
- Satellite GS or Satellite GS Pro
- RTK Real-time Kinematic
Note: Some differential sources may require a feature unlock or subscription. Refer to Feature Unlocks Tab for additional assistance with entering feature unlocks. Contact a local Raven dealer for assistance with purchasing feature unlocks or subscriptions.
The GNSS receivers on both the tractor and implement must be using the same differential source. Make sure to select the same settings for both GNSS receivers. Review GNSS Receiver Initial Setup for information on recommended settings.
- Select the Next page button.
- Review the GPS Status Information page.
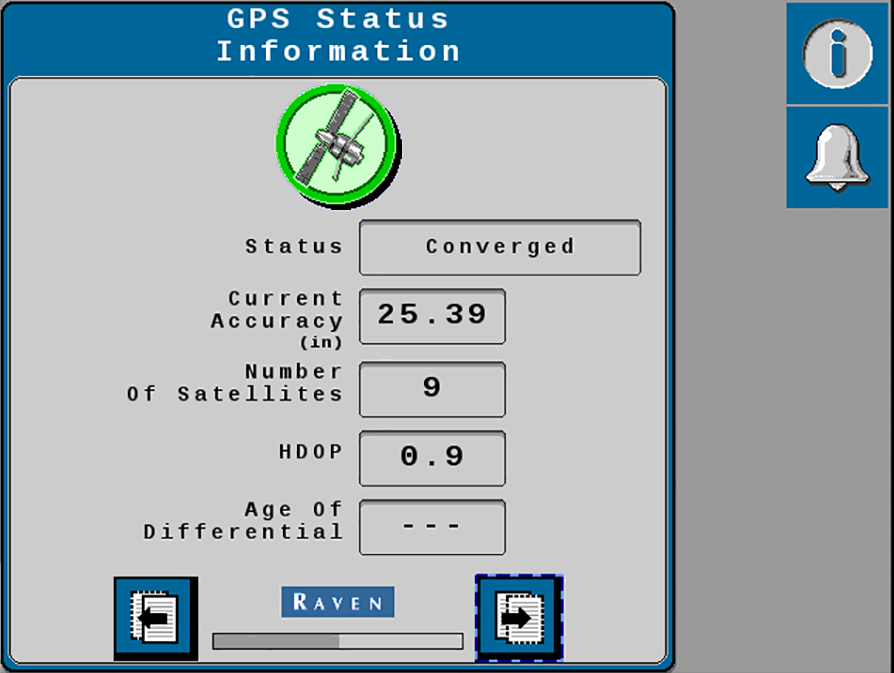
Note: The system must detect a converged GNSS status and display a green shield to successfully complete the terrain compensation calibration procedure.
-
Last Revised: Sep 2024